
Dredge recovery during sunset. We got rocks! Photo: Catherine Mével (IPGP/CNRS), IPGP/CNRS/Ifremer.
Before the Challenger expedition (1872-1876), which was the first true scientific oceanographic cruise, little was known about how deep the big oceans were or what lurked in the abysmal waters. This expedition changed our view of the great oceans: from being regarded as empty and lifeless, the expedition brought home thousands of species never discovered before.
Equipped hundreds of kilometres of hemp rope for sounding, the crew on the HMS Challenger were able to figure out the depths of the very deepest oceans on the planet (including the Mariana trench, the deepest point on the planet). Not only did the expedition map out the deep oceans and bring home tremendous amounts and worth of biology – they also did the very first rock sampling of the deep ocean.
The HMS Challenger, launched in 1858, was the first vessel to do deep sea geological sampling. Picture: PD-Challenger Report, Wikimedia Commons.
Rock sampling on the HMS Challenger was done by a method called dredging, which is a generic term covering all recovery of material from the bottom of a column of water. The basic principle of dredging is to have a basket of some kind that gathers samples as it is dragged along the ocean floor. The basket is attached to a cable extending from the ship. When the ship moves, the basket is dragged along the seafloor and collects samples.
The HMS Challenger was a rebuilt navy ship with a specially designed dredging platform. It also had a steam engine, but for most of the time the operations was carried out by sailing – also the dredges. Considering that they did not have the modern electronic winches with strong metal cables nor nowhere near the engine power have we today, gathering rock samples from thousands of metres below the surface was a truly remarkable feat.
Although our present methods are far more sophisticated, having remotely operated vehicles (ROV) and autonomous underwater robots to explore the water column, geologists today still utilize dredging. Dredging is much less expensive than using robots, but still has the potential of gathering large amounts of sample material. It is relatively easy to deploy, and depending on the water depth and distance covered, a single dredge can be done in everything from a few to five-six hours.
On the Pourquoi Pas? the dredge has the following setup:
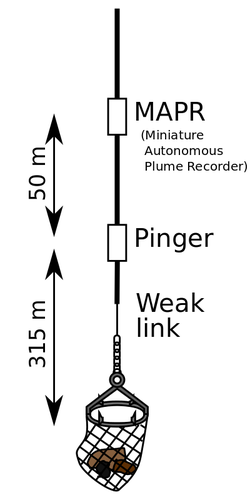
The dredge itself is a robust, circular metal frame. To the metal frame a net made of chains is attached. The metal frame has ‘teeth’, which has the potential ‘bite’ loose rock fragments from hard surfaces as the dredge is being dragged along.
A series of successively stronger links connects the dredge to the ship:
The dredge itself is being dragged by a sturdy chain. The chain is attached with a bolt of a known breaking strength to relatively thin cable that is ~200 m long. Together with the chain, this cable can be dragged along the seafloor without harming the ship’s main cable.
The thin cable is attached to the ship’s main cable with another bolt. This bolt has a breaking strength above that of the chain, bolt and cable below. The ship’s main cable is goes to the ship’s A-Frame, which is a frame on the very end of the back deck that can be tilted outwards behind the ship to deploy equipment.
The schematic figure of the dredge is from Miguel Massot Campos (UIB).
A series of successively stronger links connects the dredge to the ship:
The dredge itself is being dragged by a sturdy chain. The chain is attached with a bolt of a known breaking strength to relatively thin cable that is ~200 m long. Together with the chain, this cable can be dragged along the seafloor without harming the ship’s main cable.
The thin cable is attached to the ship’s main cable with another bolt. This bolt has a breaking strength above that of the chain, bolt and cable below. The ship’s main cable is goes to the ship’s A-Frame, which is a frame on the very end of the back deck that can be tilted outwards behind the ship to deploy equipment.
The schematic figure of the dredge is from Miguel Massot Campos (UIB).
 The solid metal frame of the dredge has a chain basket attached to it, capable of carrying large amounts of rock. The teeth of the dredge help samples get into the basket and to "bite" off rock samples from the basement rocks as the dredge is being dragged along the seafloor. Photo: Catherine Mevel (CNRS/IPGP), IPGP/CNRS/Ifremer.  Heavy bolts link the dredge frame to the chain above. Similar bolts link the different parts of the cable. If the dredge gets stuck, these bolts break first. By having successively weaker links, we avoid loosing a lot of cable if something goes wrong. Photo: Catherine Mevel (CNRS/IPGP), IPGP/CNRS/Ifremer. |  Chris Macleod and Javier Escartin in the map room planning dredge targets. Photo: Kristian Haaga (UiB), IPGP/CNRS/Ifremer.  Dredging is being done from the bridge, where the dredge can be monitored on the pinger screen. The winch can also be controlled from the bridge. Here is Diane Bonnemais (IPGP) (in the back), Chris Macleod (Cardiff U.) and Juliette (from the ship crew) overseeing the operations. Work tasks when dredging include making sure that not too much cable is at the bottom at any time, and making sure that the tension on the cable doesn't get too high. Photo: Catherine Mével (IPGP/CNRS), IPGP/CNRS/Ifremer. |
Since there are currents in the water, the length of the cable does not necessarily correspond to how deep the dredge itself is. Therefore we attach a pinger on the second, thinner cable, around 300 m above the dredge. The pinger sends a sound that echoes at the seafloor. We then record this echo and the ping arriving directly to the bridge for us to monitor, and the time difference gives us the altitude of the pinger above the seafloor, allowing us to monitor how the dredge behaves. Sometimes we also attach an autonomous mapper, which record different physical and chemical parameters in the water column that we can read when the dredge comes to the surface again.
With the ship’s automated positioning system we are able to be very precise when we deploy and recover the dredge. Precise positioning minimizes the risk of sampling from areas that we do not want to sample from, and is very useful when we want to target a specific feature on the seafloor. Examples of this can be when we are trying to find out what rocks constitute a steep scarp, but not wanting to sample the sediment around it, which can have rocks that can have been transported from elsewhere.
Volume-wise we can get up to around up to >1000 kg of sample material in one single dredge. Some of our dredges so far have been very successful. Of course this makes us very happy, but in some dredges we recovered too
much rock to curate. After sifting through all the boulders, a fraction is put aside, and the material will be discarded at a later time.
much rock to curate. After sifting through all the boulders, a fraction is put aside, and the material will be discarded at a later time.
Once the material on deck, we carry the rocks to the wet lab, where we sort them after type and select samples that we want to investigate further. Like with the ROV samples, the rocks are sawed, described, photographed again, labeled and thereafter packed. The only difference is that, since we know with less certainty where the dredged samples come from, the dredge samples only get to be stored in bags. The ROV samples get to stay in nice, blue plastic boxes.

Antoine Bezos (U. Nantes) sorting out fresh volcanic glass from a dredge sample. Photo: Catherine Mevel (IPGP/CNRS), IPGP/CNRS/Ifremer.
 RSS Feed
RSS Feed
